














基本信息
- 项目名称:
- 基于单片机的智能清洁机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本设计的清洁机器人是以路虎小车为底盘,STC89S52单片机为控制核心,加以直流电机、红外线传感器、电源电路、遥控电路以及其它电路构成,主要分驱动模块、避障模块、无线通讯模块、清洁地面模块、工作机构升降装置和供水系统等。设计的清洁机器人有两种工作模式:一为遥控工作模式;二为自动工作模式。
- 详细介绍:
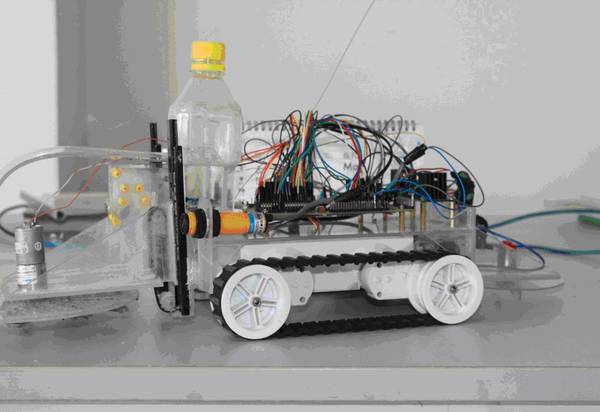
- 本作品为家用自动/遥控拖地工具,主要功能为拖地并将地面吹干。有两种工作模式:一为遥控模式,可根据手柄遥控其工作;二为自动模式,依靠避障功能实现自动工作。 作品的底盘为履带式,使其有更好的稳定性和跨越障碍能力。主控芯片为51系列单片机,两个步进电机完成小车的行走和转向,电机的驱动芯片为L298n,红外避障。小车前方用步进电机或直流电机带动圆盘式拖布清洁地面,后方安装类似吹风机机构将地面吹干,并且圆盘转动速度和吹干机构运动快慢与工具行走速度有关。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 思路:本次设计的清洁机器人是以路虎小车为底盘,STC89S52单片机为控制核心,加以直流电机、红外线传感器、电源电路、遥控电路以及其它电路构成,主要分驱动模块、避障模块、无线通讯模块、清洁地面模块、工作机构升降装置和供水系统等。设计的清洁机器人有两种工作模式:一为遥控工作模式;二为自动工作模式。 创新点:工作部分能够升降,不工作的时间升起来,易于清洗工作部分;采用两种模式,即可以自动工作也可以遥控工作,在闲暇之余可以控制它拖地,来休息放松;我们采用六通道无线传输装置用于机器人的遥控;自动供水装置使用重力,不需额外能量的输入,减少能源的使用;采用吹干装置快速吹干,使清洁效果更好。 主要技术指标:工作速度0.5m/s,效率10m2/min,0.3m处自动避障,遥控半径20米,驱动电压12V,控制电压5V。
科学性、先进性
- 与现有国内外的产品相比较,目前市场上主要的是智能吸尘器,很少有既能拖地又能吹干的。而且我们的设计既有自动模式又有遥控模式,现在人的压力越来越大,在闲暇之余可以遥控它工作,既能清洁室内又可以休息放松。同时,我们设计依靠重力的自动给水系统,节能社会中我们注重节能环保,减少能源的消耗。
获奖情况及鉴定结果
- 未参加过任何活动
作品所处阶段
- 实验室阶段
技术转让方式
- 非专利技术转让
作品可展示的形式
- 实物、产品、模型、现场演示、图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 目前市场上主要的是智能吸尘器,很少有既能拖地又能吹干的;而且我们的设计既有自动模式又有遥控模式,现在人的压力越来越大我们在闲暇之余可以遥控工作,既能清洁室内又可以休息放松;同时我们设计自动给水系统并且它的工作采用重力,节能社会中我们注重节能环保,减少能源的消耗。 我们的作品主要用于室内清洁,对于室内的大小形状没有具体要求,而且可以越过较低的障碍物。 目前清洁机器人在市场上有广阔的应用前景,开发它的厂家不是很多,效益相当可观。
同类课题研究水平概述
- 国内目前已开始有关的研究开发工作,特别是在移动机器人的运动规划与控制方面取得了一定的成就,为研究开发清洁机器人奠定了技术基础。大学开发研制了全方位移动地面清扫机器人,该机器人的控制系统能够准确解读遥控信号,并对机体下达工作指令,随时接收“眼睛”(即红外光电开关和超声传感器)感知的四个方向的外部障碍信息,并据此要求机器人做直线或转向运动,行进中,它不停转动地板刷,把地面上的灰尘全部填进“肚”内,这种机器人一次充电可持续工作半小时,具有智能电源管理功能,延长了运行时间,平均每分钟行走速度为15 m。此外,该清洁机器人采用开放式机器人控制结构,实现硬件可扩展、软件可移植、可集成,使得机器人作为服务载体具有更好的功能适应性。目前国内最新全力出击的国产KV8智能清洁机器人,各款都相继推出,功能也在不断的完善之中。 国外各国发展程度不尽相同。日本某公司在2002年上半年推出了家庭用吸尘器机器人的试制机。该机器人可以根据房间的形状、地板状况、垃圾量进行自动清扫,工作时,首先会沿房间四周走一圈记忆房间形状,然后,在避开障碍物的同时以纵、横向方式来回移动进行清洁,清洁工作完成后会自动停止。该吸尘器机器人配备有50个传感器,可一边自动行走一边进行清扫。它利用光及超声波的测距传感器、压力传感器来避开障碍物,内置有回转传感器,用来控制行走姿势以保持既定的行进方向,安装了方向舵传感器,可以检测出由于地毯花纹影响而产生的行进方向偏差,因此即使在铺有地毯的地板上也能够直线前进;澳大利亚的V4吸尘机器人,澳大利亚某公司也研制出可自动行驶并打扫房间的V4型机器人,这种全自动吸尘器表面光滑,体积很小,呈圆形,内置搜索雷达,可以搜索各种房间里的每一处,不会碰撞家具或其它障碍物。微处理小电脑使它具备在拐至屋角处能探测方向、选择前进路线的能力。只要将全自动吸尘器放在地面上,它便可自动开始工作;美国伦巴吸尘器,由美国某学院人工智能实验室开发的智慧型自动吸尘器,运用人工智能运转与导航侦测技术,聪明地打扫每一寸地板,搭配独有的真空吸孔与旋转刷,清洁效果特别好。被美国TIME评选为2002年最酷的发明之一。只要按下开关伦巴就会全自动在指定区域吸尘打扫,碰到障碍物会自动转向,遇到楼梯也会自动侦测不会掉下去,特殊的真空吸孔、旋转刷与旋转边刷设计无论是地毯或地板,清洁都很方便。还有瑞士三叶虫吸尘器一系列清洁机器人。








