














基本信息
- 项目名称:
- 智能仿生六足机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 机器人通过传感器识别路径,检测前方是否有障碍物,综合处理后规划行走路径,并通过可人为调整视角的摄像头采集现场信息。适用于大部分人无法进入的工作环境,如进行设备巡视、工程探险勘测、军事侦察、煤矿井下勘探、排雷排爆现场信息采集、抢险救灾、实时跟踪及一些需要引导的情况等。
- 详细介绍:
- 我们旨在设计一种在复杂多变的地形条件下有着强大的机动性和灵活性,能够在人类无法进入或者难以到达的区域进行工程探险勘测、反恐防爆、军事侦察、探测、防灾、抢险救灾等的智能机器人。基于仿生学原理和十六位单片机,集寻迹、避障、现场视频采集等功能于一身,自主性高。
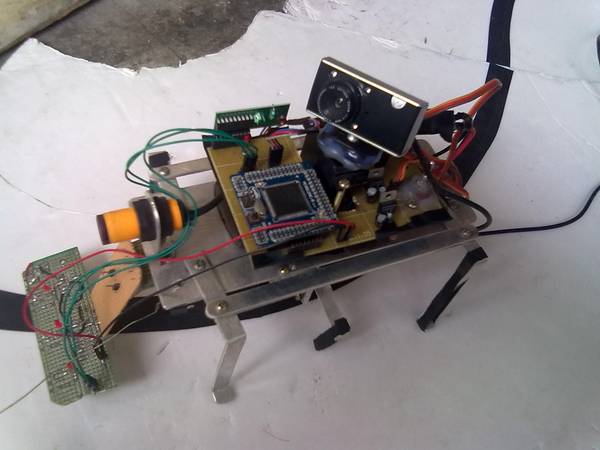
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1 集寻迹、避障、现场视频采集等功能于一身,智能性高。 2 根据仿生学原理, 以蚂蚁足部轨迹为出发点, 设计出一种能够符合行走要求的简单腿部机构。 3 采用16位单片机,结合更优越的软件算法,为机器人提供了灵活的“大脑”。
科学性、先进性
- 步态规划方法是仿生多足机器人最为基础又最为关键的技术之一. 当前的研究成果出于简化控制的考虑,通常都会选择周期规则步态作为仿生多足机器人的步态规划依据, 但在自然界中,蚂蚁的常规步态虽是“周期”步态,但却非“规则”步态.另外,虽然许多学者曾在仿生学基础上进行过有关节肢动物行走特性和步态特点的大量实验,但能够真正用于指导仿生六足机器人步态规划的实验结果却并不理想。为了探索有利于提升仿生六足机器人控制特性的步态规划策略,我们通过对典型六足昆虫—蚂蚁常规步态的实验研究, 深入了解六足昆虫的真实步态,对比完全仿生的周期步态与不完全仿生的周期规则步态分别作为仿生六足机器人步态规划策略的适应性和可行性.
获奖情况及鉴定结果
- 作品在陕西省汉中市陕西理工学院第四届挑战杯获得特等奖
作品所处阶段
- 中试阶段
技术转让方式
- 无
作品可展示的形式
- 实物现场演示,图片,录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:本作品使用简单,使用者只需将其放于指定位置并打开开关即可。 技术特点和优势:小巧玲珑,机械传动简单,能稳定的实现寻迹、避障和图像采集,完全能替代人进行一些恶劣环境下的勘探、现场信息采集以及巡视设备工作状况等。 适用范围:适用于大部分人无法进入的工作环境,如煤矿井下勘探、排雷排爆现场信息采集、实时跟踪及一些需要引导的情况。 推广前景:该作品成本低廉,却具有不错的智能性,工作环境要求低,可替代人在苛刻的环境下工作,因此有很广泛的市场需求和较高的性价比,经济效益会很高。
同类课题研究水平概述
- 多足机器人的研究现状 多足机器人的研究主要集中在以下几种机械结构: 1 单连杆式 出于简易灵活、价格低廉的角度考虑, 些功能单、以娱乐性为主机器人的六条腿采用单连杆机构设计,并以较少的自由度实现了基本的步行功能,减少r执行电机,简化了设计。目前市面上有很多诸如此类的爬虫玩具,不为常见的单丰T式腿结构的机器人。但是,过于简单的腿部结构以及较少的自由度导致此类机器人难以完成复杂的动作,实用性较差。不过这类机器人也可阻通过简单的控制完成倒退、转弯等功能,只是无法实现精确定位。 2 四连杆式 该机构有多种衍化形式,可用连杆曲线轨迹作为足端轨迹的种步行机构,以旧杆机构为腿部机构的设计原则和日的部是为了尽可能保证足端运动轨迹的平整性,达到使机器人平稳运动的目的。其优点在于结构简单、轻便。不过平面连杆结构输出轨迹固定,且存在一定的死点,所以只能实施固定的跨步轨迹,难以成为灵巧型的机器人。 3 缩放式 早期的四足、六足步行机器人都用过此类步行机构。缩放机构由于在其运动主平面具有运动解藕性,易于控制,当缩放比大于1时能以较小本体实现较大的空间运动等优点,被广泛应用于多足步行机器人的腿部机构。缩放式腿机构具有比例性,可将驱动器的推动距离比例放大为足端运动距离。 4 关节式 由于多关节机构具有活动范围大,灵活性好的优点,所以为近几年步行机器人采用。此外,开环关节式机构的末端操作点无论是在机体的上部还是下部都有非常大的运动空间,且机构不存在死点的情况,机构比较简单;但是刚性较差,传动误差大而且不易控制。








