东华大学专区
基本信息
- 作品名称:
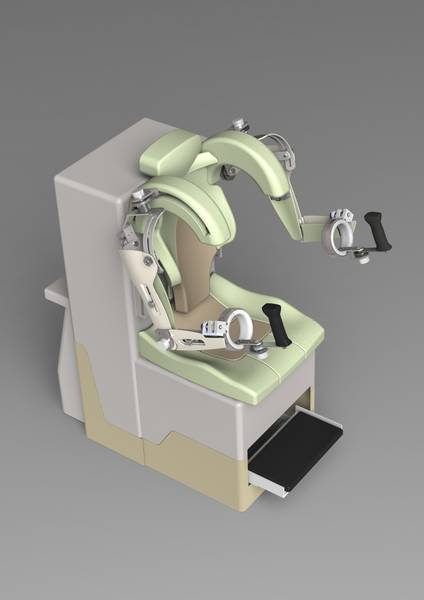
- 上肢康复训练机器人
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
本上肢康复训练机器人用于中风偏瘫患者的康复训练。采用穿戴式外骨骼设计,由气动驱动。该机器人既能直接准确地模拟手臂的各种运动,又能利用患者的一侧健康手臂自主运动信息直接驱动患者另一侧患肢作随动康复运动。
康复训练上能轻松实现患者上肢的被动(全助力)、半主动(半助力)、主动(阻力)、随动及其组合训练模式。
利用本机器人,中风偏瘫患者可在社区医院或家庭进行个性化康复训练。- 详细介绍:
本作品涉及一种采用气动控制且能方便实现对手臂及手指各关节运动模拟的穿戴式外骨骼上肢康复训练机器人。该机器人在肩关节处采用带虚轴的三自由度设计,实现了机构与上肢的紧密依附,并且通过在腕部采用一套空间六杆机构,实现了腕部的背伸屈曲和内收外展两个自由度,同时由于在各旋转副处添加了角度传感器收集反馈机构运动的角度信息,既能直接准确地模拟真实手臂的各种运动,也能方便利用患者的一侧健康手臂自主运动信息来直接驱动患者另一侧患肢作随动康复运动,因此在康复训练上能轻松实现患者上肢的被动(全助力)训练、半主动(半助力)训练、主动(阻力)训练和随动训练。
采用本发明牵引手臂及手指作各种姿势的运动,主要涉及四大创新点:
1.康复训练机器人采用气动元器件作为作动件,充分利用气弹性等气动技术的特点,容易模拟人体肌肉的作动效果;并将驱动器和阻尼器合二为一,容易实现被动、半主动、主动训练。
2.将驱动元件置于固定的机架上,极大地减轻了运动构件的重量,通过线管钢丝绳传动,保证了机构运动的灵活性。
3.利用机电一体化技术,患者通过健侧手臂的自由运动来控制患侧手臂的伴随运动,实现患者的自主康复训练。
4.采用弧形导轨设计了带虚轴的三自由度外骨骼式肩关节,在满足机构与人体不干涉的前提下实现肩部的完整运动。- 获奖情况:
第十二届“挑战杯”作品 三等奖
无